What's New in Pictorus - Q2 Wrap 2025
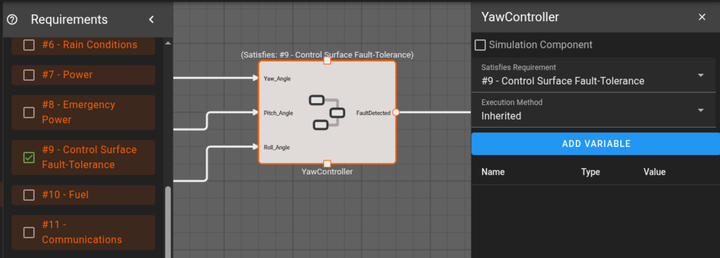
Summer salutations from the team at Pictorus! It’s been a busy quarter here and we’re excited to tell you about what we’ve been up to and our new features. We've open-sourced our core library, introduced a public API, implemented a requirements traceability workflow, added